1、邏輯編程
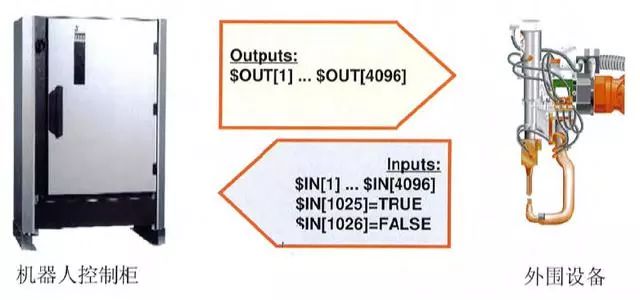
輸入輸出的設置是為了機器人與外設設備的通訊,例如東西傳感器等
2、可用邏輯指令
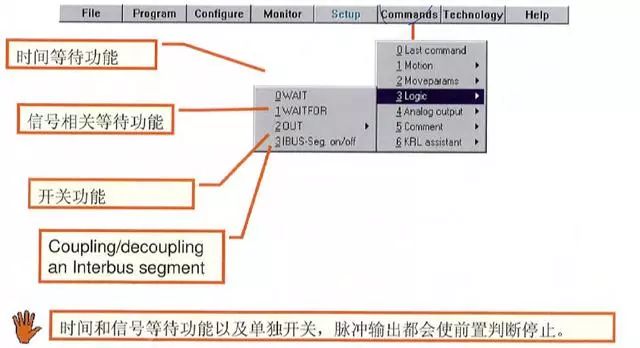
3、等候時間功用邏輯指令
(2)等候信號程序可用編寫,例如以下常用方法。

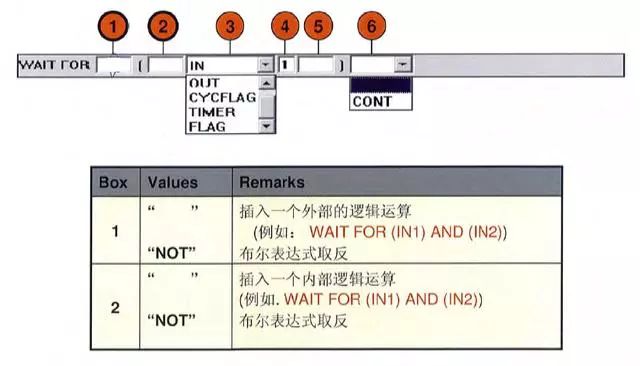
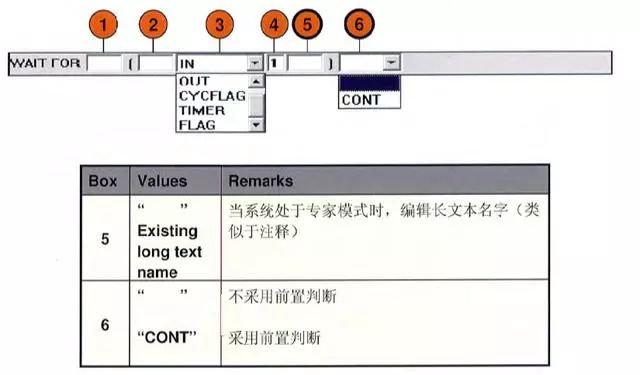
(3)假如“WAIT FOR”指令被挑選,你們下列參數(shù)能夠被設置
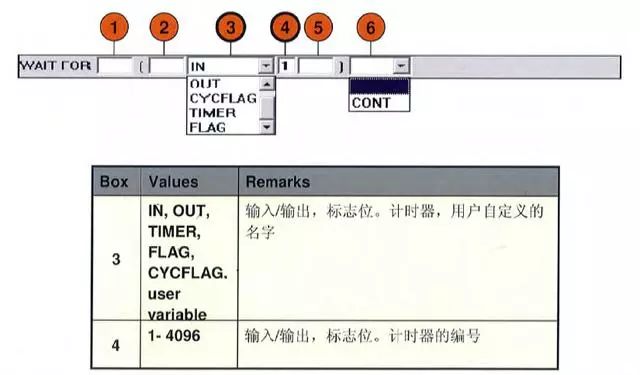
(4)假如“WAIT FOR”指令被挑選,你們下列參數(shù)能夠被設置
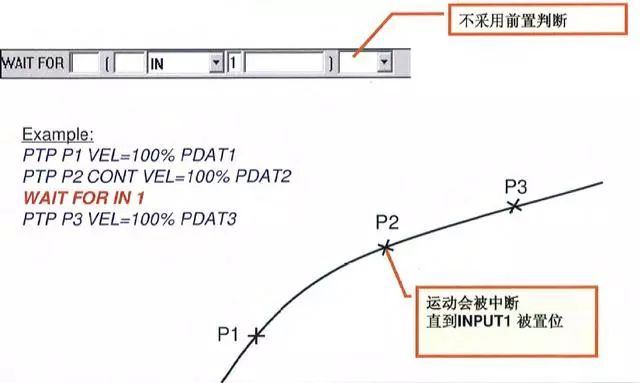
(5)假如“WAIT FOR”指令被選用打斷前置判別的方法,每一個點都會準確達到即便條件現(xiàn)已滿意。
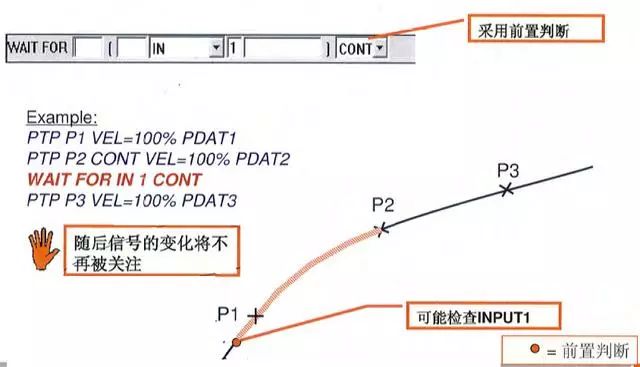
(6)假如“WAIT FOR”指令挑選CONT形式,你們條件將會被前置判別,假如條件滿意,那么就會選用迫臨方法。
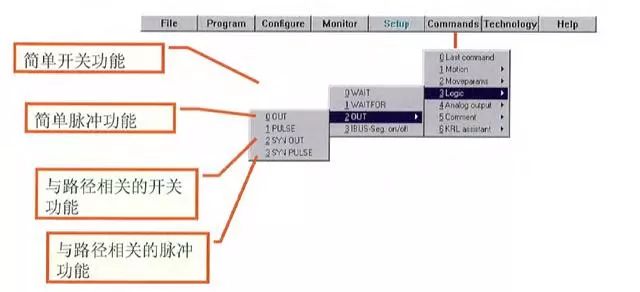
5、輸出功用
(1)以下功用按選件能夠被挑選
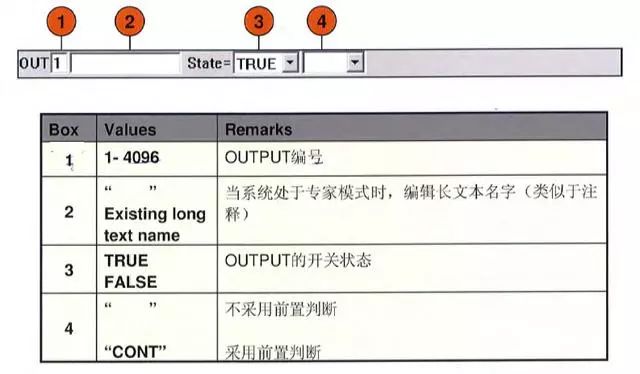
(2)簡略輸出指令一
假如“OUT"指令被挑選,那么以下參數(shù)能夠設置
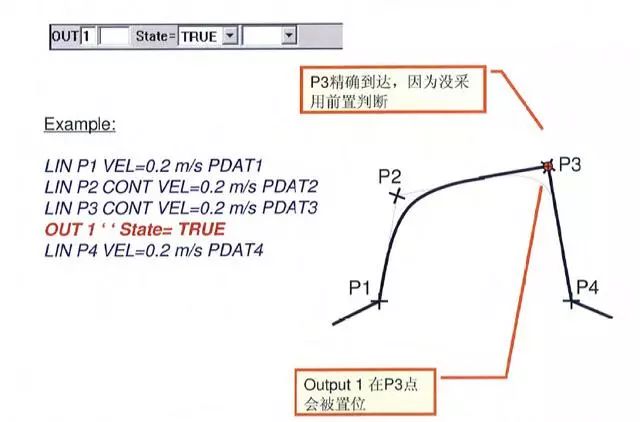
(3)簡略輸出指令二
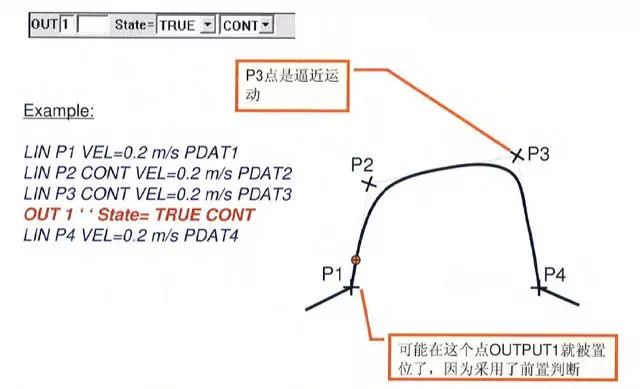
4)簡略輸出指令三
(5)、簡略脈沖指令一
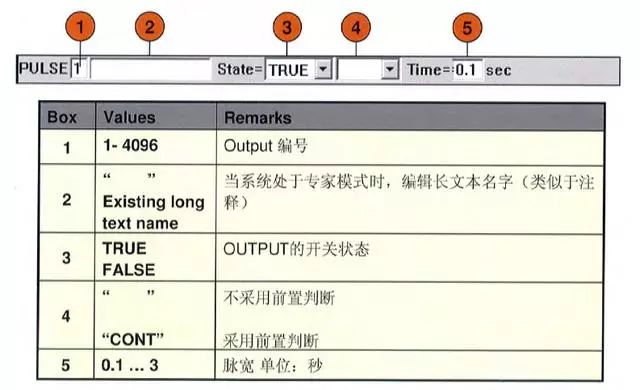
(6)簡略脈沖指令二

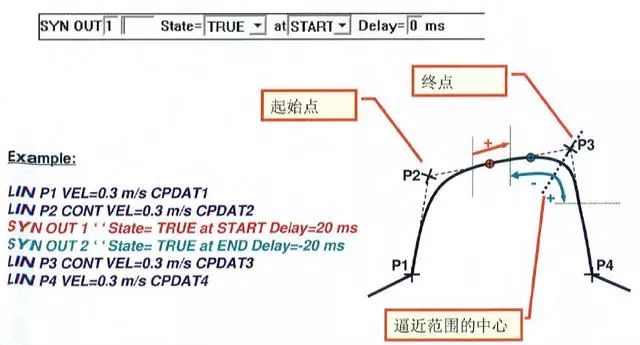
6、同步輸出指令
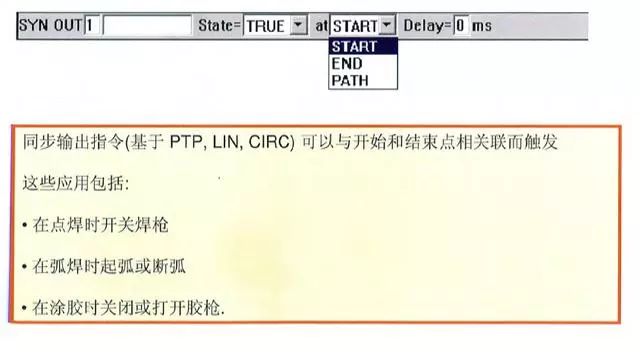
7、信號輸出
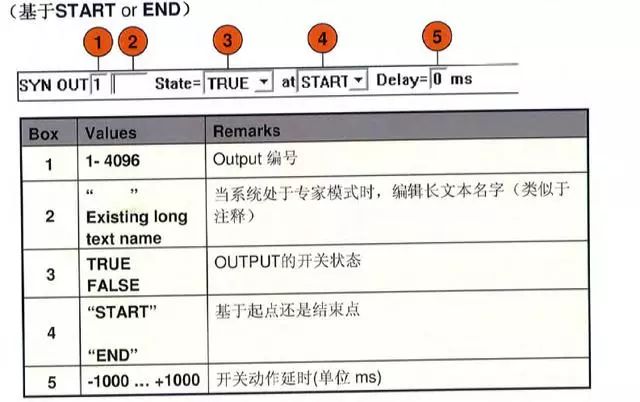
(1)在途徑開端或許完畢處輸出信號一
假如"OUT"指令被挑選,那么以下的參數(shù)能夠設置
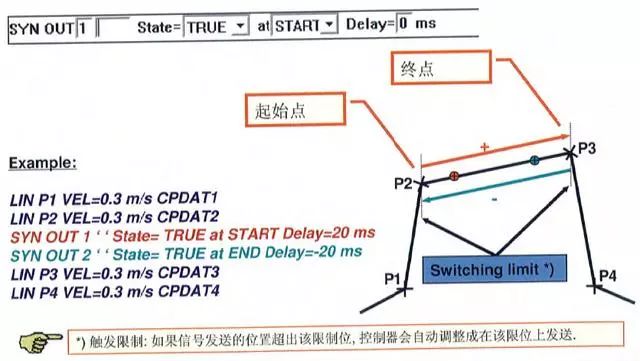
(2)開始點和完畢點都準確抵達
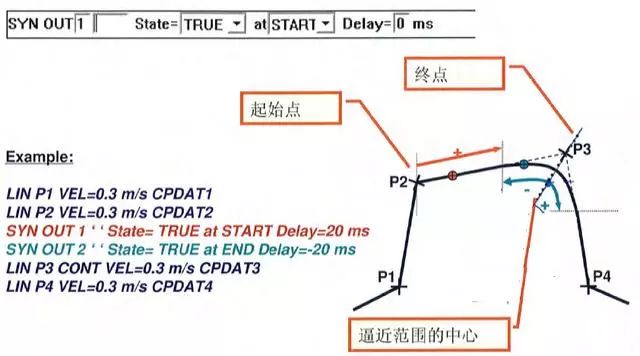
(3)起點準確抵達點,結尾是迫臨點
(4)開始點和完畢點都迫臨點
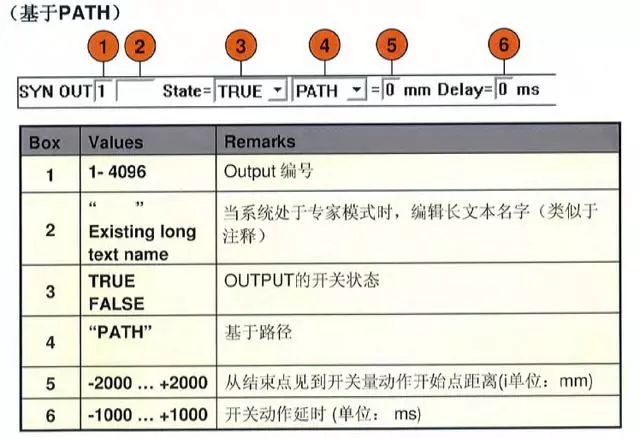
(5)在途徑如何方位輸出信號
a、假如你運用途徑相關的SYNOUT-PATH指令,你能夠沿著程序途徑上的
知道距離的任意點觸發(fā)開關量。
b、和開始完畢點相關同步指令相同,這種指令也能夠提早或許推遲發(fā)送
信號。
c、途徑相關的開關量操控僅僅被允許用在接連途徑運動中(LIN 或許 C
IRC)。
d、SYNOUT-PATH指令是針對下一個運動指令而言的。
e、假如一個SYNOUT-PATH指令運用于一個PTP運動,那么運動履行時會被
軟件回絕。
(6)途徑相關同步輸出指令一
假如“OUT”指令被挑選,那么以下參數(shù)能夠設置
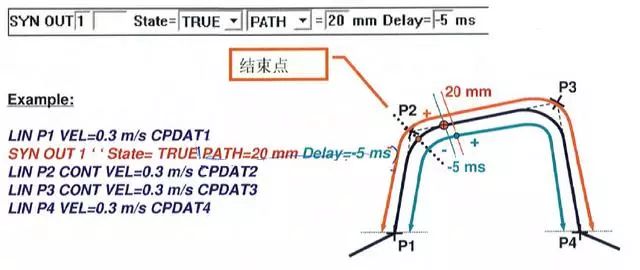
(7)途徑相關同步輸出指令二
開始點是準確抵達點,結尾是迫臨點
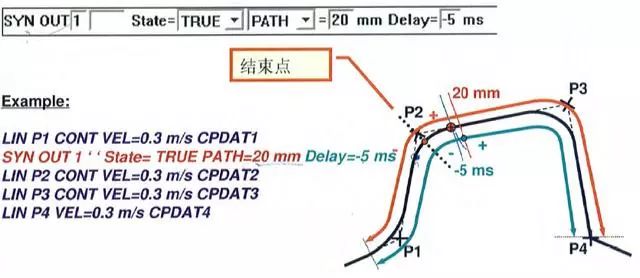
(8)途徑相關同步輸出指令三
開始的和完畢點都是迫臨點
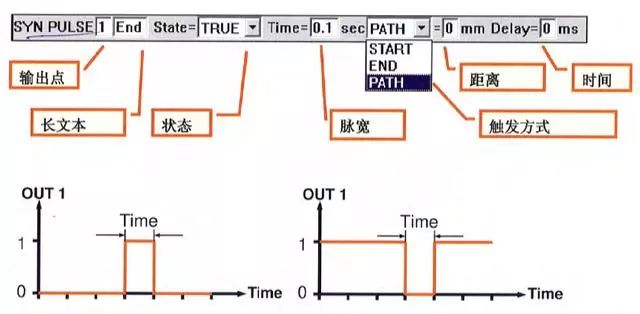
8、同步脈沖指令
假如“SYN PULSE”被挑選,那么以下參數(shù)能夠設置
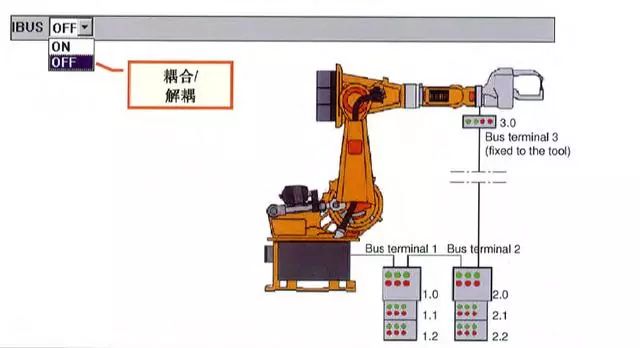
9、Inter bus 部分耦合和解耦
假如“IBUS-seg.on/off ”被挑選,那么以下參數(shù)能夠設置
 電話
電話 郵箱
郵箱 北京市房山區(qū)良鄉(xiāng)凱旋大街建設路18號-D4857
北京市房山區(qū)良鄉(xiāng)凱旋大街建設路18號-D4857